Author: Alexander Chang
When a condition affects mobility, a person will often use a technological invention to improve their quality of life and regain a portion of their lost mobility. One of the most common forms of technological aid is prosthetics. The earliest use of prosthetics can be seen in ancient Egypt around 950–710 B.C. where two prosthetic toes were discovered at the necropolis of Thebes-West1.Even to this day, prosthetics are used as assistive devices; however, other conditions that affect mobility have led to the invention and use of modern biomedical technologies. Spinal cord injury, arthritis, back disorders, cerebral palsy, neuromuscular disorders, fibromyalgia, and other physiological problems also affect a person’s ability to move, something that cannot always be adjusted with prosthetics alone2.
For those with conditions that affect mobility such as paraplegia or paralysis of the legs and lower body, previous limitations in biomedical advancement presented little hope of recovering the ability to walk. Other alternatives, such as epidural electrical stimulation or stem cell implantation, offer hope, but none of these biomedical advancements are close to bringing mobility up to a satisfactory level. Aside from curing the condition or injury, one of the few existing alternatives to regaining a large portion of a person’s mobility is the use of an exosuit.
Exosuits are not a new idea to thepublic: exosuits have even established a place in popular culture, a point made evident by movies like Aliens (1986), The Avengers (2012), and Elysium (2013). Although present-day exosuits are nowhere near as advanced as those seen in movies, actual exoskeletons are slowly making their way into the presentday public market. In January 28, 1890, Nicholas Yagn patented the first exoskeleton-like device that could facilitate walking, running, and jumping3. Seventy-four years later, Niel J. Mizen created an exoskeleton named “The Man Amplifier” in a Cornell Aeronautical Laboratory that marked the advent of exoskeletons from ideas to reality4. These were just rough designs that were clunky, not easy to take off or operate, and expensive, thereby making the innovation not fit to be released to industry or the public.
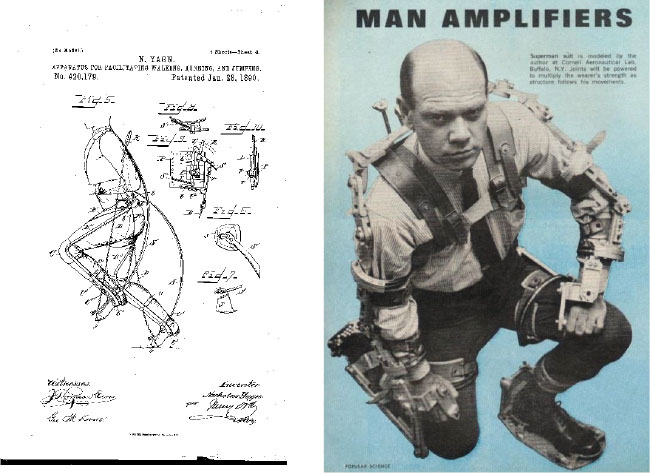
First patented exoskeleton design3 (left) and Cornell’s “Man Amplifier”5 (right).
One of the first exoskeletons that showed actual potential for the public market was proposed by Yoshiyuki Sankai of Cybernics in 19926. HAL or hybrid assistive limb has two different movement settings built in based off of years of research: cybernic voluntary control and cybernic autonomous control. Under cybernic voluntary control, HAL provides “physical support/actions according to the operator’s voluntary intention caused by the bioelectrical signals including muscle activity”6. When a bioelectrical signal is detected, the suit will calculate the necessary power assist torque required from the suit to supplement the joint torque of the wearer in completing an action such as walking or standing. This setting can assist those with disabilities in their limbs, but with persons that have a gait disorder, this setting cannot be used because the bioelectrical signals that induce a broken walking pattern are not factored into a power assist torque calculation. Additionally, persons with gait disorders often have injured spinal cords that are unable to sufficiently send signals from the brain to other parts of the body, signals which, if successfully transmitted, would prompt movement assistance from the device. HAL’s cybernic autonomous control monitors center of gravity shifts that usually occur before a person starts executing an action. For example, when walking, the center of gravity shifts to one leg prior to the initiation of the action. The lab coined this technology “intention-based walking support.” Currently, the hybrid assistive limb exoskeleton suit can be purchased for $14,000–$19,0007.
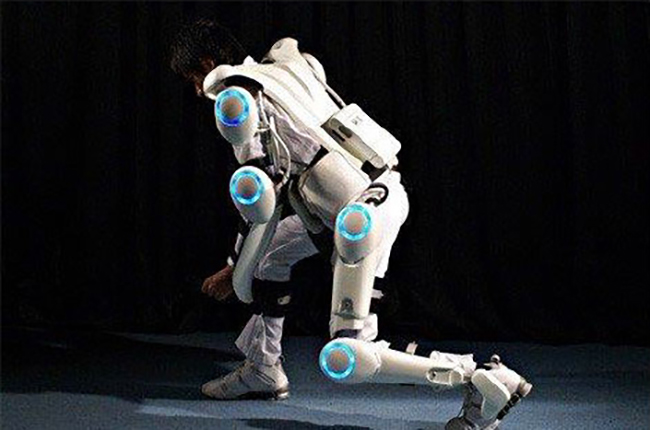
Cyberdyne’s HAL EU Model and Full Body Type8
Aside from the HAL series created by Sankai and Cybernics, there have been a series of other companies and universities developing similar exoskeletons. Vanderbilt University created their own exoskeleton called Indego for rehabilitation purposes and as an alternative mode of mobility assist9. Another type was created by Ekso Bionics for survivors of stroke, spinal cord injury, and other forms of lower extremity complications10. All of these exoskeletons were created for the purpose of helping those with conditions that affect mobility, but Berkley decided to take exoskeletons a step further and created BLEEX, Berkley lower extremity exoskeleton, in order to enhance normal human capabilities. In 2005–2006, BLEEX was able to carry a significant load and support its weight while walking energetically autonomous, a first for human exosuits11. With the potential to enhance humans past physiological bounds, it is no surprise that the military is attempting to integrate the technology for combat purposes.
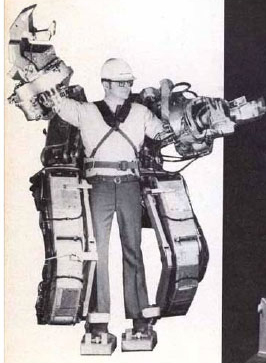
The Hardman I Prototype12
In August 30, 1971, General Electric released a report, Final Report on Hardman I Prototype For Machine Augmentation of Human Strength and Endurance, that contained information on an exosuitthat the company was developing for the Naval Air Systems Command at the Army Mobility Equipment Research and Development Center in Virginia13. As the first exosuit designed for military purposes, it was extremely heavy and bulky at 1,500 pounds and three feet wide13. Many issues were present, but the concept itself was significant because the exoskeleton could hold up to 1,500 pounds in addition to its own body weight13. Thirty-nine years later, another company, Raytheon, released a press announcement and demonstration of an exosuit that was developed for the US Defense Advanced Research Projects Agency (DARPA)14. In 2001, DARPA commissioned five exoskeleton designs for the Human Performance Augmentation program, but only two made it past the drawing board: Raytheon’s XOS exoskeleton line and Lockheed Martin’s Human Universal Load Carrier (HULC). It is worth noting that HULC was designed using BLEEX as a base14.

Raytheon X0214(left) and Lockheed Martin’s Exosuit15 (right).
From medicine to military, exoskeletons are being developed by separate research and engineering groups, but the key issues behind advancement are the same. One key limitation of current exoskeleton technology involves issues with torque and power16. The unnatural shape of the current models negatively affects the efficiency of muscle actuators. Muscle actuators are “contractile and linear motion engines operated by gas pressure”17. A cylindrical membrane has gas pumped into it or sucked out of it in order to extend or contract the pseudo-muscle. An alternative to muscle actuators are electroactive polymers that can be crafted into synthetic muscle fibers that may offer advantages for smoother, more controlled actions, noise-free operation, and a more anthropomorphic appearance16. Another key issue is the limitations associated with the flow of information between the device and the user’s nervous system. Currently, exoskeletons only predict intentions in order to process movement or just enhance motions given, but a truly autonomous exoskeleton will require sensors to be placed inside the user’s body to give the device better access to the motor cortex and other tissues involved with movement. Ultimately, this fully autonomous exoskeleton would allow the wearer to control the suit with just thoughts16. Solving these issues, as well as complications presented by mechanical interface and construction costs, might allow future exoskeletons to revolutionize the medical technology industry, and perhaps even the apparel industry.
References
- Nerlich, A.G., Zinc A., Szeimies, U., & Hagerdorn, H. G. Ancient Egyptian prosthesis of the big toe. Lancet, 356(9248), 2176-2179 (2000).
- Mobility Impairments. The Division of Disability Resources and Educational Services,College of Applied Health Sciences at the University of Illinois at Urbana-Champaign. Retrieved from http://www.disability.illinois.edu/instructor-information/disability-specific-instructional-strategies/mobility-impairments#2 (n.d.).
- Yagn, N. U.S. Patent No. 420,179 A. Washington, D.C.: U.S. Patent and Trademark Office (1890).
- Mizen, N. J. Design and test of all full-scale, wearable, exoskeletal structure.Buffalo, NY: Cornell Aeronautical Laboratory,Rep. No. VO-1692-V-3, 1-75(1964).
- Man Amplifier [Photo], Mizen N. (Inventor). Popular Science (Nov 1965).
- Sankai, Y. HAL: Hybrid Assistive Limb based on Cybernics. Systems and Information Engineering, University of Tsukuba. Retrieved from http://sanlab.kz.tsukuba.ac.jp/sonota/ISSR_Sankai.pdf.
- George, D. How Hybrid Assistive Limb (HAL) exoskeleton suit works. Retrieved from http://smashingrobotics.com/how-hybrid-assistive-limb-hal-exoskeleton-suit-works/ (2014, June 12).
- Cyberdyne HAL-5 robotic exoskeleton[Web Photo]. Retrieved from http://www.robaid.com/wp-content/gallery/humorg/cyberdyne-hal-5-0.jpg (n.d.).
- Indego.Retrieved from http://www.indego.com/indego/en/home (n. d.).
- EksoBionics. Retrieved from http://www.eksobionics.com/ (n.d.).
- Zoss, A., & Kazerooni, H. Design of an electrically actuated lower extremity exoskeleton. Advanced Robotics, 20(9), 967-988 (2006).
- General Electric ‘Hardiman’ Electric Exoskeleton [Photo], Mosher R. (Inventor). Retrieved from http://www.freerepublic.com/focus/f-chat/2978520/posts (1967).
- Fick, B. R., & Makinson, J. B. Final Report on Hardman I Prototype For Machine Augmentation of Human Strength and Endurance. Schenectady, NY: General Electric Company,1-34 (1971).
- Raytheon XOS 2 Exoskeleton, Second-Generation Robotics Suit.Retrieved from http://www.army-technology.com/projects/raytheon-xos-2-exoskeleton-us/ (n. d.).
- HULC [Web Photo], Lockheed Martin (Inventor).Retrieved from http://www.dailytech.com/From+HULC+to+FORTIS+the+Evolution+of+Lockheed+Martins+Incredible+Exosuit/article36421.htm (n. d.).
- Herr, H. Exoskeletons and orthoses: classification, design challenges and future directions. J Neuroeng Rehabil, 6(2009).
- Daerden, F. & Lefeber, D. Pneumatic artificial muscles: actuators for robotics and automation, European Journal of Mechanical and Environmental Engineering, 47(1), 10-21 (2002).